Penyelesaian Akar dari 3 Persamaan (3 variabel) Menggunakan Metode Newton-Raphson
•
Computational Physics
Dalam dunia sains dan teknik, sering kali kita dihadapkan pada tantangan untuk menemukan akar dari suatu sistem persamaan. Salah satu metode yang efektif dan populer untuk menyelesaikan sistem persamaan non-linier adalah metode Newton-Raphson.
Artikel ini akan membahas bagaimana metode Newton-Raphson, yang awalnya dikembangkan untuk mencari akar persamaan dengan variabel tunggal, dapat diperluas untuk menyelesaikan sistem persamaan non-linier dengan tiga variabel. Kunci dari perluasan ini adalah penggunaan matriks Jacobian, yang merupakan matriks turunan parsial pertama dari fungsi yang diberikan.
Dengan memahami dan menerapkan metode Newton-Raphson dan matriks Jacobian, kita dapat menemukan solusi yang tepat dan efisien untuk sistem persamaan nonlinier.
Persoalan
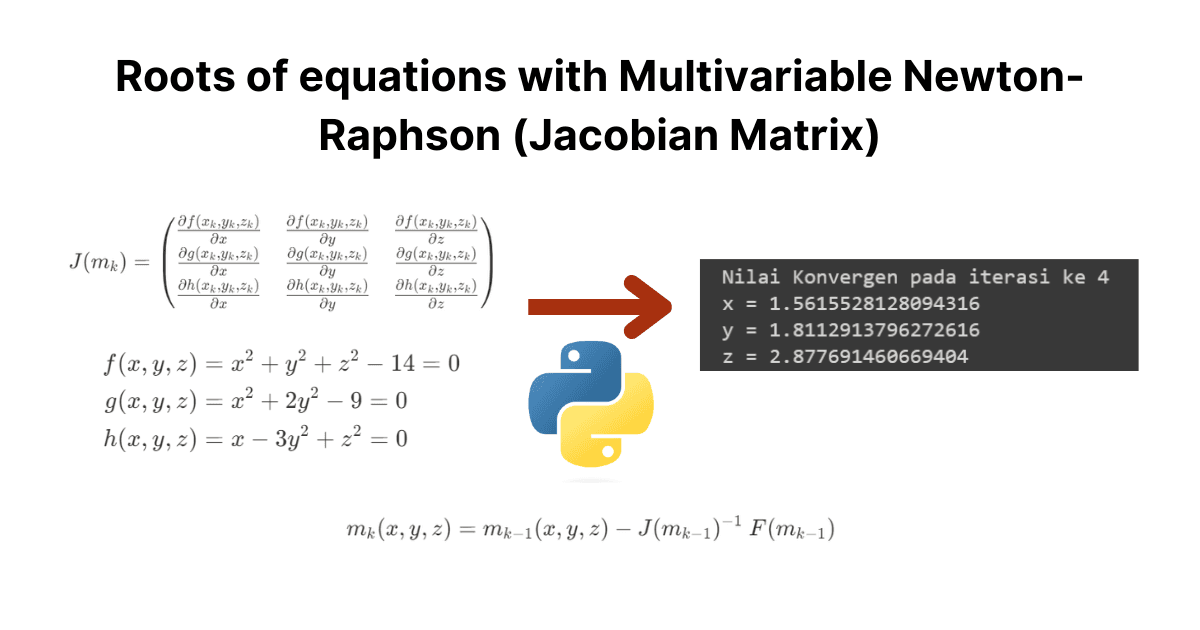
Diberikan 3 persamaan sebagai berikut
Selesaikan ketiga persamaan tersebut secara simultan untuk mengestimasi nilai , , !
Definisi Permasalahan Secara Numerik
Pertama-tama kita buat satu matriks yang mendefinisikan ketiga persamaan di atas dalam satu wadah yang sama.
Lalu kita definisikan sebagai solusi dari ketiga persamaan di atas, sekaligus masukan dari fungsi .
Selanjutnya kita definisikan matriks Jacobian, atau matriks turunan dari ketiga persamaan pada persoalan di atas.
Bila dihitung, turunan parsial untuk fungsi Jacobian menjadi
Dikarenakan jumlah unknowns harus sama dengan jumlah persamaan yang ada (dalam soal ini 3 unknowns dan 3 persamaan), matriks Jacobian pasti merupakan matriks dengan jumlah baris dan kolom yang sama. Jumlah kolom merepresentasikan jumlah unknowns dan jumlah baris merepresentasikan jumlah persamaan.
⚠️ Perlu diketahui pula bahwa determinan dari matriks Jacobian tidak boleh nol, agar bisa dilakukan invers
Karena akan dilakukan pendekatan numerik Newton-Raphson, maka perlu didefinisikan persamaan pembaharuan dari setiap iterasi. Di mana adalah iterator dari fungsi pengulangan.
Penjelasan Komputasi Numerik dengan Python
Sebelum melangkah pada penerapannya di Python, secara umum Pseudo-code dari permasalahan ini adalah sebagai berikut
Definisikan fungsi
Definisikan matriks Jacobian
Buat array untuk nilai mula-mula solusi: solusi
Atur nilai toleransi: tol
FOR I=1, MAXITER
1. Hitung F(solusi)
2. Jika NORM(F(solusi)) < tol, maka konvergen & keluar. Selain itu lanjut.
3. Hitung matriks Jacobian df = J(solusi)
4. Jika DETERMINAN(df) == 0, Terjadi eror & keluar. Selain itu lanjut
5. Hitung solusi = solusi - INVERS(df)*f(solusi)
ENDDOPenerapan pada Python
Sebelumnya, kita masukkan library yang akan digunakan, yakni numpy.
import numpy as npHal pertama yang harus dilakukan adalah mendefinisikan fungsi dalam python.
def F(solusi):
x, y, z = solusi
f = x**2 + y**2 + z**2 - 14
g = x**2 + 2*y**2 - 9
h = x - 3*y**2 + z**2
return np.array([f, g, h])Selanjutnya, definisikan matriks Jacobian yang telah dibuat pada bagian sebelumnya.
def J(solusi):
x, y, z = solusi
dpfx = 2*x
dpfy = 2*y
dpfz = 2*z
dpgx = 2*x
dpgy = 4*y
dpgz = 0
dphx = 1
dphy = -6*y
dphz = 2*z
return np.array([[dpfx, dpfy, dpfz],
[dpgx, dpgy, dpgz],
[dphx, dphy, dphz]])Selanjutnya, adalah membuat nilai awal dari solusi yang kita cari dengan metode Newton-Raphson. Penting untuk tidak menaruh nilai nol pada solusi awal, yang dapat mengakibatkan determinan dari matriks Jacobian bernilai nol, sehingga tidak bisa dilakukan invers pada matriks tersebut. Dengan pertimbangan tersebut, maka nilai solusi awal yang digunakan adalah
Sehingga, dalam python dibuat matriks solusi dengan np.ones yang akan menghasilkan matriks 1 dimensi dengan 3 item bernilai 1. Kode ditampilkan sebagai berikut
solusi = np.ones(3)Selanjutnya definisikan berapa toleransi yang diperbolehkan, dan maksimal iterasi loop yang perlu dijalankan.
tol = 1e-3
maxiter = 10Untuk loop utamanya, akan dijabarkan sebagai berikut
# Untuk mempercantik hasil print
val_print = ["x", "y", "z"]
for ii in range(maxiter):
# Hitung F(solusi)
val_F = F(solusi)
# Jika NORM(F(solusi)) < tol, nilai konvergen. Print hasil
if (np.linalg.norm(val_F) < tol):
print("Nilai Konvergen pada iterasi ke", ii)
for i in range(len(solusi)):
print(val_print[i], "=", solusi[i])
break
# Hitung matriks Jacobian, J(solusi)
df = J(solusi)
# Jika DETERMINAN(df) == 0, Terjadi eror & keluar
if (np.linalg.det(df) == 0):
print("ERROR! Determinant is Zero")
break
# Hitung, solusi = solusi - INVERS(df).f(solusi)
solusi -= np.matmul(np.linalg.inv(df), val_F)Dari kode loop utama di atas pasti anda muncul pertanyaan, apa itu NORM dalam matriks. Norm dalam matriks adalah suatu fungsi yang mengukur besarnya seluruh nilai yang ada dalam matriks. Norm matriks didefinisikan sebagai nilai maksimum dari hasil perkalian matriks dengan vektor unit. Dalam matematika, norm matriks sering digunakan untuk mengukur kesalahan dalam suatu perhitungan matriks. Yang digunakan dalam pustaka numpy adalah metode NORM Frobenius.
Hasil
Dari perhitungan menggunakan python yang telah dijabarkan di atas, ditemukan hasil bahwa
| Variabel | Hasil |
|---|---|
| 1.5615528128094316 | |
| 1.8112913796272616 | |
| 2.877691460669404 |
Nilai solusi konvergen (lebih kecil daripada toleransi) pada iterasi ke-4
Kesimpulan
Dalam artikel ini, kita telah membahas bagaimana metode Newton-Raphson dan matriks Jacobian dapat digunakan untuk menyelesaikan sistem persamaan nonlinier dengan tiga variabel. Kita telah belajar bahwa metode Newton-Raphson, meskipun sederhana, adalah metode yang aktif dalam menemukan akar persamaan. Dengan bantuan matriks Jacobian, kita dapat menerapkan metode ini pada sistem persamaan dengan lebih dari satu variabel.
Secara keseluruhan, penggunaan metode Newton-Raphson dengan matriks Jacobian dalam Python menawarkan solusi yang efisien dan akurat untuk menyelesaikan sistem persamaan non-linier. Ini membuka banyak kemungkinan untuk penelitian dan aplikasi lebih lanjut dalam berbagai bidang.



